Cognitive modeling of the predictive active self in situated action (COMPAS)
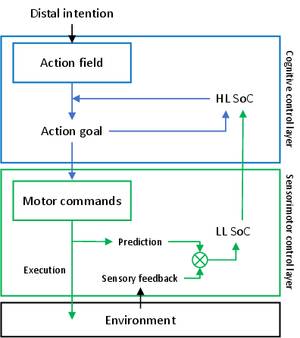
- Figure taken from Heinrich et al., 2023 (conference submission, MathPsych/ICCM/EMPG 2023). At the sensorimotor control layer, predicted sensory feedback is matched with the actual sensory feedback obtained from the environment. The degree to which both match each other is translated into the low-level Sense of Control which in turn is interpreted into a high-level Sense of Control. At the cognitive control layer, the high-level Sense of Control will directly affect which action possibility from the action field is selected and therefore pursued as the next action goal.
The COMPAS project is a collaboration between the Social Cognitive Systems group (Universität Bielefeld) and the Human-Aware AI group (Universität zu Lübeck) and part of the DFG priority program 2134 The Active Self, which tackles questions like “how the agency experience affects cognitive processes” and “how a self-representation might be established in artificial agents”.
In COMPAS, we specifically investigate dynamic decision-making within environments of varying predictability and complexity and focus on the sense of control component of the agency experience. We hypothesize that the sense of control is grounded in sensorimotor experiences and strongly linked to predictive coding and managing cognitive resources. To test our hypotheses, we rely on a combination of human eye-tracking experiments and computational cognitive modeling using our custom-developed environment.
We have just initiated a collaboration with the Body Social Cognition and Action lab at LMU. The goal is to explore further psychophysiological markers of the sense of control that arise in our dynamic task. Here we apply the EEG measurement method in experiments in Munich.
Principal Investigators
Prof. Dr.-Ing. Nele Rußwinkel (University of Lübeck) & Prof. Dr.-Ing. Stefan Kopp (Bielefeld University)
Research Associates
Nils Wendel Heinrich (M.Sc., University of Lübeck) & Annika Österdiekhoff (M.Sc., Bielefeld University)
Contribution to the latest Biannual Meeting of the spp active self
All projects investigating the self within the active self spp met again in Fulda, Novembre 26th to 28th. We brought posters!


Publications
- Heinrich, N. W., Russwinkel, N., Österdiekhoff, A., & Kopp, S. (2023, July). A Straightforward Implementation of Sensorimotor Abstraction in a Two-Layer Architecture for Dynamic Decision-Making. Paper presented at MathPsych/ICCM/EMPG 2023. Via mathpsych.org/presentation/1140.
- Österdiekhoff, A., Heinrich, N., Russwinkel, N., & Kopp, S. (2023). Towards an Hierarchical Model-Based Reinforcement Learning Approach to Dynamic Decision-Making in Uncertain Environment. Presented at the 15th International Conference on Agents and Artificial Intelligence, Lissabon.
COMPAS - first funding period
COMPAS has two main objectives: First, to develop an integrated computational architecture for embodied cognition and situated spatial action and to test it against human behavioral data in successive experimental settings. Second, to realize within this architecture a computational concept of the sense of agency and the active self and its role in online perception and control of situated action in a spatial environment.
The specific goal is to develop a model of the execution and control of situated action in an embodied cognitive architecture that allows for (a) detailed explanation of specific hypotheses about the mechanisms and processes underlying the sense of agency and the active self; (b) simulation of situated action in different environmental contexts along with predictions about the subjectively perceived sense of agency, (c) empirical validation and model fitting through comparison with empirical data obtained from experimental studies with human participants in identical settings.
Publications
Hao, C., Russwinkel, N., Haeufle, D. F., & Beckerle, P. (2023). A Commentary on Towards autonomous artificial agents with an active self: Modeling sense of control in situated action. Cognitive Systems Research, 79, 1-3.
Kahl, S., Wiese, S., Russwinkel, N., & Kopp, S. (2022). Towards autonomous artificial agents with an active self: modeling sense of control in situated action. Cognitive Systems Research, 72, 50-62.