Cognitive modeling of the predictive active self in situated action (COMPAS)
Funded by: DFG
Extended Runtime: 1.03.2025 - 31.07.2025
(Runtime: 01.01.2022 - 28.02.2025)
Project Coordinators: Prof. Dr.-Ing. Nele Rußwinkel (University of Lübeck) & Prof. Dr.-Ing. Stefan Kopp (Bielefeld University)
Research Associates: Nils Wendel Heinrich (M.Sc., University of Lübeck) & Annika Österdiekhoff (M.Sc., Bielefeld University)
Student Researchers: Martin Stuwe (B.Sc., University of Lübeck) & Carolin Klute (B.Sc., Bielefeld University)
The COMPAS project is a collaboration between the Social Cognitive Systems group (Universität Bielefeld) and the Human-Aware AI group (Universität zu Lübeck) and part of the DFG priority program 2134 The Active Self, which tackles questions like “how the agency experience affects cognitive processes” and “how a self-representation might be established in artificial agents”.
Motivation
Humans can learn new skills such as, e.g., inline skating through a process of gaining more and more control over how their actions will yield specific consequences. At first, it is necessary to put full attention to achieve a movement toward a goal a few meters away. After some training, one is able to skate and at the same time focus on a conversation with a friend. Even when going on coarse ground – with a lot of noise in haptic feedback – the skater is still confident that she has control over the situation. And, after taking off the skates, she will immediately switch back to the “normal-no-wheel” state of movement control. This example demonstrates that autonomous embodied agents need to be able to adapt how they control their situated action based on the current state of their body in a possibly uncertain environment and, importantly, an assessment of how they feel “in control” of acting in it.
Goals and Procedure
In COMPAS, we specifically investigate situated action control within environments of varying uncertainty and complexity and focus on the sense of control component of the agency experience. We hypothesize that the sense of control is grounded in sensorimotor experiences and strongly linked to predictive coding and higher-level perceptual processing. To test our hypotheses, we rely on a combination of human eye-tracking experiments and computational cognitive modeling using our custom-developed environment.
Innovation and Prospects
Robotic systems equipped with the investigated control architecture could make use of cognitive mechanisms that would enable new ways of collaborative human-robot interaction. A robot may inform its human partner of its low SoC, switch to a safer mode of operating, or ask for help. Further, we investigate mechanisms needed for collaborative situated interaction, like embodied Theory of Mind and mental (co-)simulation. For example, a robot equipped with our computational cognitive model may be able to anticipate not only its own action field, but also another one’s actions and their expected outcomes.
Project Partners
With the start of the second funding phase, we have initiated a collaboration with the Body Social Cognition and Action lab at LMU. The goal is to explore further psychophysiological markers of the sense of control that arise in our dynamic task. Here we apply the EEG measurement method in experiments in Munich.
Link to Project Details
https://activeself.de/cognitive-modelling-of-the-predictive-active-self-in-situated-action-compas/
Information processing within and between layers of our conceptual architecture.
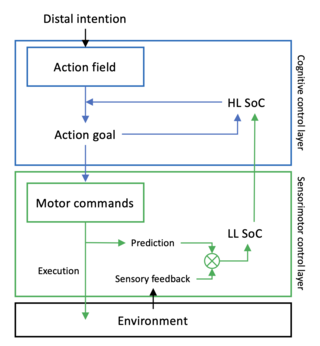
Figure taken from Heinrich et al., 2023 (conference submission, MathPsych/ICCM/EMPG 2023). At the sensorimotor control layer, predicted sensory feedback is matched with the actual sensory feedback obtained from the environment. The degree to which both match each other is translated into the low-level Sense of Control which in turn is interpreted into a high-level Sense of Control. At the cognitive control layer, the high-level Sense of Control will directly affect which action possibility from the action field is selected and therefore pursued as the next action goal.
First Funding Phase (2019 - 2022)
COMPAS has two main objectives: First, to develop an integrated computational architecture for embodied cognition and situated spatial action and to test it against human behavioral data in successive experimental settings. Second, to realize within this architecture a computational concept of the sense of agency and the active self and its role in online perception and control of situated action in a spatial environment.
During the first phase of the project, a comprehensive computational cognitive model was developed and tested using a complex simulation environment. Initial experiments with humans informed about the model's internal processes, which had to be modified. The output of the first funding phase was a computational model that elicits goal-directed behaviour based on the sense of agency which is refined and built upon in the subseqeuent funding phase.
Key publication:
Kahl, S., Wiese, S., Russwinkel, N., & Kopp, S. (2022). Towards autonomous artificial agents with an active self: modeling sense of control in situated action. Cognitive Systems Research, 72, 50-62.
Publications
2026
Giving AI agents a sense of control facilitates reinforcement learning in multitasking scenarios, PLOS One , 2026. PLOS.
| DOI: | https://doi.org/10.1371/journal.pone.0342305 |
| Bibtex: | @article{osterdiekhoff2026giving,
title={Giving AI agents a sense of control facilitates reinforcement learning in multitasking scenarios},
author={{\"O}sterdiekhoff, Annika and Heinrich, Nils Wendel and Ru{\ss}winkel, Nele and Kopp, Stefan},
journal={Plos One},
year={2026}
} |
2025
Towards a Bayesian Cognitive Model of Self-Belief Updating, in Proceedings of International Conference on Cognitive Modeling (ICCM 2025) , PA: Applied Cognitive Science Lab, Penn State, 2025. pp. 68-74.
| Weblink: | https://acs.ist.psu.edu/papers/ICCM2025Proceedings.pdf |
| Bibtex: | @inproceedings{heinrich2025towards,
title={Towards a Bayesian Cognitive Model of Self-Belief Updating},
author={Heinrich, Nils Wendel and von Engelhardt, Rebecca and {\"O}sterdiekhoff, Annika and Kopp, Stefan and Russwinkel, Nele},
booktitle={Proceedings of International Conference on Cognitive Modeling (ICCM 2025)},
year={2025}
} |
Using Eye Movements to Understand Sense of Control in Situated Action, Cognitive Science , vol. 49, pp. e70154, 2025. Wiley Periodicals LLC,
| DOI: | 10.1111/cogs.70154 |
| Weblink: | https://onlinelibrary.wiley.com/doi/pdf/10.1111/cogs.70154 |
| Bibtex: | @article{heinrich2025using,
title={Using Eye Movements to Understand Sense of Control in Situated Action},
author={Heinrich, Nils Wendel and {\"O}sterdiekhoff, Annika and Kopp, Stefan and Russwinkel, Nele},
journal={Cognitive Science},
volume={49},
number={12},
pages={e70154},
year={2025},
publisher={Wiley Online Library}
} |
Am I in control? The dynamics of sensory information, performance feedback, and personality in shaping the sense of control, Consciousness and Cognition , vol. 135, pp. 103938, 2025. Elsevier,
| Weblink: | https://www.sciencedirect.com/science/article/pii/S105381002500131X |
| Bibtex: | @article{giersiepen2025control,
title={Am I in control? The dynamics of sensory information, performance feedback, and personality in shaping the sense of control},
author={Giersiepen, Maren and Heinrich, Nils Wendel and {\"O}sterdiekhoff, Annika and Kopp, Stefan and Russwinkel, Nele and Sch{\"u}tz-Bosbach, Simone and Kaiser, Jakob},
journal={Consciousness and Cognition},
volume={135},
pages={103938},
year={2025},
publisher={Elsevier}
} |
2024
Goal-directed Allocation of Gaze Reflects Situated Action Control in Dynamic Tasks, in CogSci 2024 , Proceedings of the Annual Meeting of the Cognitive Science Society, 2024.
Allocation of Fixational Eye Movements in Response to Uncertainty in Dynamic Environments, in CogSci 2024 , Proceedings of the Annual Meeting of the Cognitive Science Society, 2024.
Sense of Control in Dynamic Multitasking and its Impact on Voluntary Task-Switching Behavior, in CogSci 2024 , Proceedings of the Annual Meeting of the Cognitive Science Society, 2024.
Developing and Evaluating a Computational Cognitive Model of Sensorimotor Grounded Action Selection Based on Eye-movement Behavior, in Mathpsych / ICCM 2024 , The Society for Mathematical Psychology, 2024.
| Weblink: | https://mathpsych.org/presentation/1584 |
2023
A Straightforward Implementation of Sensorimotor Abstraction in a Two-Layer Architecture for Dynamic Decision-Making, In Proceedings of Mathpsych/ICCM 2023 , 2023.
| Bibtex: | @inproceedings{heinrichn.oestediekhoffa.kopps.russwinkeln2023,
author = {Heinrich, N., Östediekhoff, A., Kopp, S., Russwinkel, N.},
title = {A Straightforward Implementation of Sensorimotor Abstraction in a Two-Layer Architecture for Dynamic Decision-Making},
booktitle = {In Proceedings of Mathpsych/ICCM 2023},
year = {2023},
note = {MathPsych/ICCM 2023 Amsterdam (International Conference on Cognitive Modelling).},
url = {https://mathpsych.org/presentation/1140}
} |
")
News
01.03.2025: Extended Runtime!
...
28.02.2025: The official term of COMPAS has ended. Unfortunately, this also means that Martin's time with us is over. Thank you Martin, you have been a great help. But our collaboration does not end here. We will use 2025 to publish our research and Martin will of course work with us on the manuscripts!
...
22.09.2024: The last official summer school of the SSP "The Active Self" starts today! Looking forward to the talks and also to the symposium afterwards.
...
1.03.2024: Martin Stuwe joined us in COMPAS as a student researcher. He studies Computer Science at the University of Lübeck. Martin supports us especially in the ACT-R modeling and improving the intersection of our experimental environment and the computational models. Welcome Martin!
...
Contribution to the latest Biannual Meeting of the SPP "The Active Self". All projects investigating the self within The Active Self SPP met again in Fulda, Novembre 26th to 28th (2023). We brought posters!

